Kinematic Analysis
Mechanisms and Machines | 2023
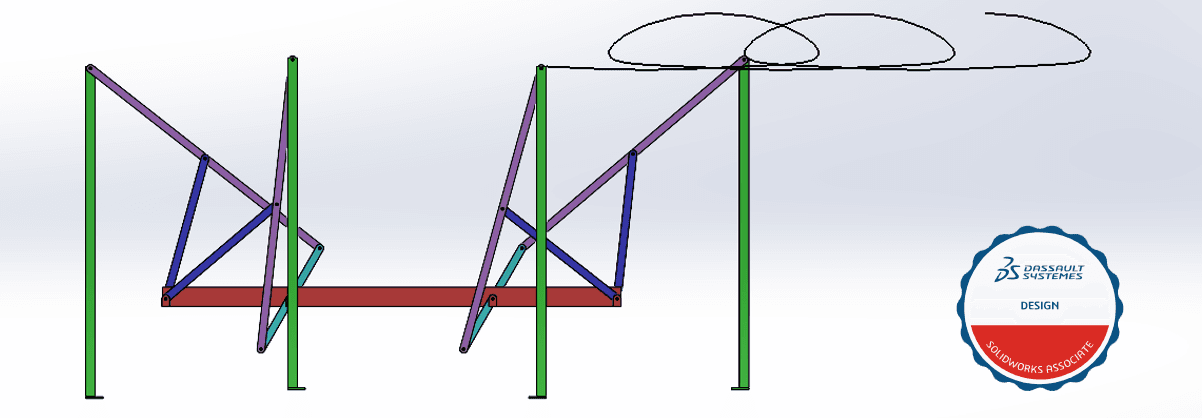
For this course project in ME 4302, Adele's team designed a four-legged walking machine based on Chebyshev’s Lambda Mechanism. The full assembly was developed using SolidWorks, applying theoretical kinematics and vector loop equations to understand link relationships, angular positions, and geometric constraints.
For this course project in ME 4302, Adele's team designed a four-legged walking machine based on Chebyshev’s Lambda Mechanism. The full assembly was developed using SolidWorks, applying theoretical kinematics and vector loop equations to understand link relationships, angular positions, and geometric constraints.

The motion analysis examined how the foot’s displacement and velocity changed throughout a full 180° rotation. Velocity behavior was evaluated to understand how the mechanism transitions between ground contact and swing phases. The results showed regions of rapidly changing velocity followed by more uniform motion, explaining the corresponding changes in displacement. This data was exported and used to calculate step size and determine how many steps were required to travel one meter, allowing simulation results to directly inform quantitative performance analysis.
The motion analysis examined how the foot’s displacement and velocity changed throughout a full 180° rotation. Velocity behavior was evaluated to understand how the mechanism transitions between ground contact and swing phases. The results showed regions of rapidly changing velocity followed by more uniform motion, explaining the corresponding changes in displacement. This data was exported and used to calculate step size and determine how many steps were required to travel one meter, allowing simulation results to directly inform quantitative performance analysis.